Sensors and Auxilary Items
Cameras and Sensors
Purpose: To figure out the complex workings of the game while it is being played, sensors and cameras are needed for the robot and its drivers to get a handle on what is going on around it.
Limelight
- It is a "plug-and-play smart camera"
- The Limelight allows us to program different vision pipelines for objects around the field, such as note detection, allowing us to know exactly where a note is at any time when it is in the field of vision. Knowing where the notes are allows us to efficiently maneuver around the field, allowing us to score as many points as possible. (Note: notes are from CRESCENDO)
- To power it you can either connect it on the 12V 2A slot on the VRM or to a side (small) connector on the PDH
- If we do not have any ports available, we will follow the answers in this post, and slap a 20AMP breaker to the pdh. How can we power our limelight?
- Ethernet will just go to the network switch

USB/Ethernet Cameras
- The Axis M1013, M1011 and Axis 206 Ethernet cameras are used for capturing images for vision processing and/or sending video back to the Driver Station laptop. The camera should be wired to a 5V power output on the Voltage Regulator Module and an open ethernet port on the network switch.
Color Sensor
- They use use an IR Camera to detect color
- 3.3V Input
- Connected to the I2C bus
Limit Switches
- Useful to act as stop switches, or to tell us when a part reaches a certain "checkpoint".
- It is a switch, that either opens or closes (NC vs NO) when you press it.
- This lets us put it into places where a game object might pass through. For example, if we had to shoot a ball, we might have a limit switch on the top, so when the ball hits the switch, we know we are ready to shoot.

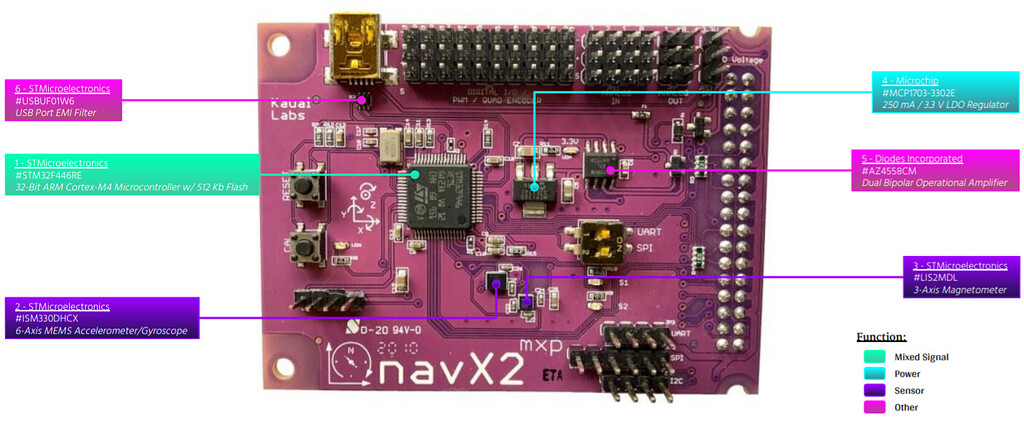
Gyroscope
- We use the NavX2
- It easily connects. We just line it up with those 34 pins in the middle of the roboRIO and plug it in.
- Here is the very shortened NavX2 documentation.
- Here is the full documentation
Additional Resources
To look at more examples of sensors, or to read more up on them, read through this documentation